- Home
- Machining techniques
- CNC Machining Services
- Cooperative supply services
- Designs
- Materials
- Finishing Services
- Shop
- Products
- Guide
- About Us
- Contact Us
2023.4.13
 Straightness vs Flatness – Difference Between Flatness and Straightness
Straightness vs Flatness – Difference Between Flatness and Straightness
 GD&T MMC: Definition, Formula, Calculation, Bonus Tolerance, Uses, MMC vs LMC
GD&T MMC: Definition, Formula, Calculation, Bonus Tolerance, Uses, MMC vs LMC
 GD&T Tolerance Definitions: 14 Different Tolerances Specific to GD&T Use
GD&T Tolerance Definitions: 14 Different Tolerances Specific to GD&T Use
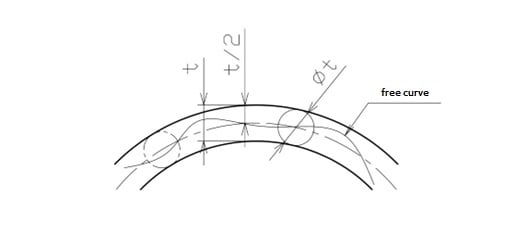 GD&T Profile Tolerance: Basic Knowledge, Types, Symbol, Calculation, Uses
GD&T Profile Tolerance: Basic Knowledge, Types, Symbol, Calculation, Uses
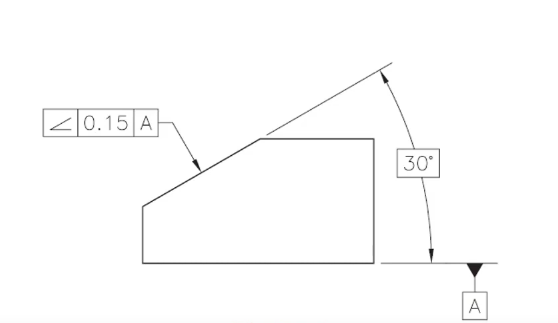 GD&T Angularity Definition, Symbol, Callout, Measurement, Tolerance & Angularity vs Profile
GD&T Angularity Definition, Symbol, Callout, Measurement, Tolerance & Angularity vs Profile
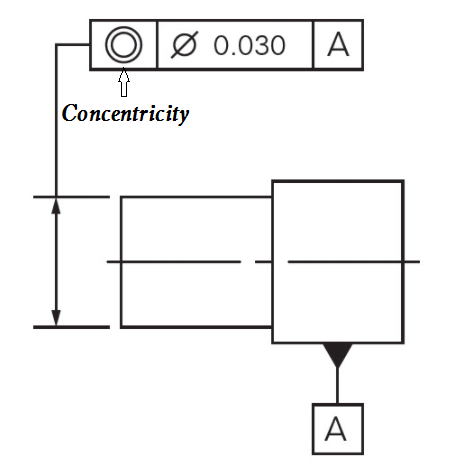 What is Concentricity in GD&T – How to Measure, Calculate Concentricity & Concentricity vs Runout
What is Concentricity in GD&T – How to Measure, Calculate Concentricity & Concentricity vs Runout
